Below, we will explain how to code a DSP program in dAsms using a relatively simple example.
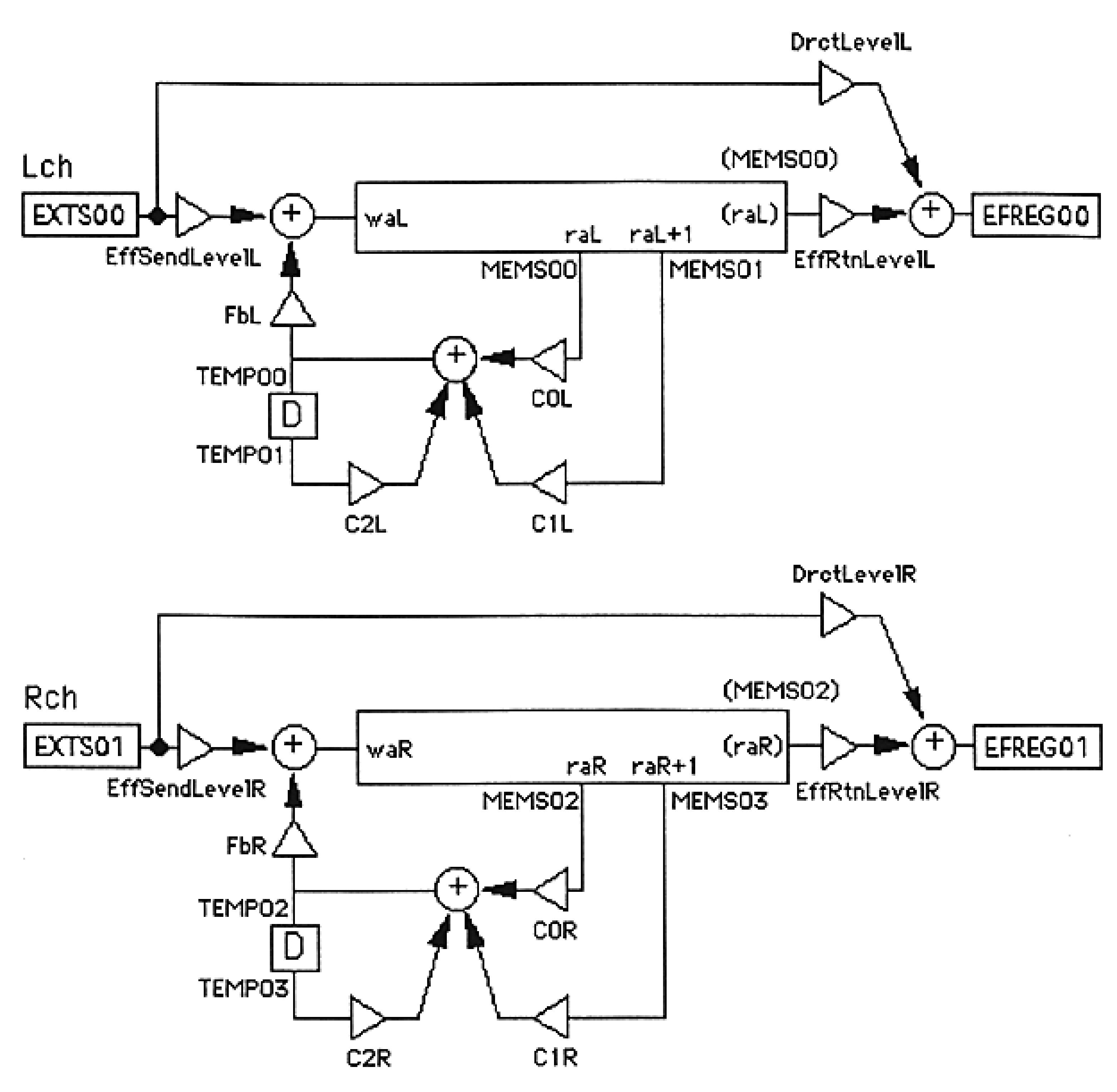
In the example program below, external expansion inputs EXTS00 and EXTS01, which can input CD Audio, etc., are used as Lch and Rch inputs, respectively, and the results of delay (echo) processing performed on Lch and Rch independently are output to EFREG00 and EFREG01, respectively. That is.
| Send level to delay | :EffSendLevelL/R |
| Direct signal level | :DrctLevelL/R |
| Return level from delay | :EffRtnLevelL/R |
| Delay signal feedback level | :FbL/R |
-------------------------------------------------- ---
EffSendLevelL=%100
EffSendLevelR=%100
DrctLevelL=%50
DrctLevelR=%50
EffRtnLevelL=%75
EffRtnLevelR=%75
FbL=%50
FbR=%50
-------------------------------------------------- ---
C0L/R
C1L/R
C2L/R
C0L=0.40893
C0R=0.40893
C1L=0.40893
C1R=0.40893
C2L=0.18164
C2R=0.18164
waL/R
raL/R
-------------------------------------------------- --------------
waL=ms0.0
raL=ms149.9
waR=ms150.0
raR=ms249.9
-------------------------------------------------- --------------
raL
raL+1
MEMS00
MEMS01
LDI MEMS00,MR[raL+DEC]
LDI MEMS01,MR[raL+DEC+1]
-------------------------------------------------- ------------------------
@ TEMP01 * C2L + ( MEMS01 * C1L + ( MEMS00 * C0L + ) )> TEMP00
-------------------------------------------------- ------------------------
-------------------------------------------------- ------------------------
@TEMP00 * FbL + ( EXTS00 * EffSendLevelL + )> MW[waL+DEC]
-------------------------------------------------- ------------------------
-------------------------------------------------- ------------------------
@EXTS00 * DrctLevelL + ( MEMS00 * EffRtnLevelL + )> EFREG00
-------------------------------------------------- ------------------------
-------------------------------------------------- ------------------------
'dAsms sample program.
'Function:L/R independent delay
'CD Lch Direct + Delayed -> EFREG00
'CD Rch Direct + Delayed -> EFREG01
#COEF
'Levels
EffSendLevelL=%100
EffSendLevelR=%100
DrctLevelL=%50
DrctLevelR=%50
EffRtnLevelL=%75
EffRtnLevelR=%75
FbL=%50
FbR=%50
'FilterCoefs
C0L=0.40893
C0R=0.40893
C1L=0.40893
C1R=0.40893
C2L=0.18164
C2R=0.18164
#ADRS
waL=ms0.0
raL=ms149.9
waR=ms150.0
raR=ms249.9
#PROG
'Lch
LDI MEMS00,MR[raL+DEC]
LDI MEMS01,MR[raL+DEC+1]
@ TEMP01 * C2L + ( MEMS01 * C1L + ( MEMS00 * C0L + ) )> TEMP00
@ TEMP00 * FbL + ( EXTS00 * EffSendLevelL + )> MW[waL+DEC]
@EXTS00 * DrctLevelL + ( MEMS00 * EffRtnLevelL + )> EFREG00
'Rch
LDI MEMS02,MR[raR+DEC]
LDI MEMS03,MR[raR+DEC+1]
@ TEMP03 * C2R + ( MEMS03 * C1R + ( MEMS02 * C0R + ) )> TEMP02
@TEMP02 * FbR + ( EXTS01 * EffSendLevelR + )> MW[waR+DEC]
@EXTS01 * DrctLevelR + ( MEMS02 * EffRtnLevelR + )> EFREG01
#END
-------------------------------------------------- ------------------------